- 4 مرحله فرآیند برنامه ریزی استراتژیک
- شاخص اهرم مالی
- گزارش فیلترهای حالت مشترک از 118 مروری بر صنعت ، بازار یا بخش در یک منطقه جغرافیایی خاص
- سرمایه گذاران حرفه ای تحت MIFID
- چرا FXView "معتبرترین انتخاب" به عنوان کارگزار است؟
- اشتغال برای سودآوری از بازار سهام
- فرمول متوسط حرکت
- سود خالص
- Bitboy Crypto vs Pompliano Full (XRP ، Shiba ، Doge ، Safemoon حمله کرد)
- راهنمای مبتدی برای Swissquote: بررسی کامل

آخرین مطالب
امکانات وب


ابزاری جدید برای پیش بینی مسیر حرکت شخص ممکن است به انسان و روبات ها کمک کند تا در مجاورت نزدیک همکاری کنند.
مخاطب را فشار دهید:

یک الگوریتم جدید به روبات ها کمک می کند تا مسیرهایی را که افراد در محیط های ساختاری مانند کف کارخانه طی می کنند پیش بینی کنند ، که ممکن است همکاری نزدیک بین انسان و ماشین را فراهم کند.
تصویر قبلی تصویر بعدی
در سال 2018 ، محققان MIT و سازنده خودرو BMW در حال آزمایش روش هایی بودند که در آن ممکن است انسان و روبات در مجاورت مونتاژ قطعات خودرو کار کنند. در یک ماکت از یک طبقه کارخانه ، این تیم یک ربات را روی ریل ها قرار داد که برای ارائه قطعات بین ایستگاه های کاری طراحی شده است. در همین حال ، کارگران انسانی هر چند وقت یکبار از مسیر خود عبور می کردند تا در ایستگاه های اطراف کار کنند.
اگر شخصی که از آنجا عبور می کرد ، این روبات برنامه ریزی شده بود تا لحظه ای متوقف شود. اما محققان متوجه شدند که این ربات مدتها قبل از آنکه شخصی از مسیر خود عبور کند ، اغلب در محل ، بیش از حد محتاطانه منجمد می شود. اگر این امر در یک محیط تولید واقعی اتفاق بیفتد ، چنین مکث های غیر ضروری می توانند به ناکارآمدی های مهم جمع شوند.
این تیم مشکل را به محدودیتی در الگوریتم های تراز مسیر ربات که توسط نرم افزار پیش بینی حرکت روبات استفاده شده است ، ردیابی کرد. در حالی که آنها می توانند به طور منطقی پیش بینی کنند که شخص به کجا هدایت می شود ، به دلیل تراز ضعیف زمان ، الگوریتم ها نمی توانند پیش بینی کنند که چه مدت آن شخص را در هر نقطه در طول مسیر پیش بینی شده خود گذراند - و در این حالت ، چه مدت طول می کشد تا یک شخص طول بکشدمتوقف شوید ، سپس دوباره به عقب بروید و دوباره از مسیر ربات عبور کنید.
اکنون ، اعضای همان تیم MIT راه حلی ارائه داده اند: الگوریتمی که مسیرهای جزئی را در زمان واقعی تراز می کند و به پیش بینی کننده های حرکت اجازه می دهد تا زمان حرکت یک شخص را به طور دقیق پیش بینی کنند. هنگامی که آنها الگوریتم جدید را در آزمایشات کف کارخانه BMW به کار بردند ، دریافتند که به جای یخ زدن در محل ، این روبات به سادگی چرخید و تا زمانی که فرد دوباره از آن عبور کرد ، با خیال راحت از راه خارج شد.
جولی شاه ، استادیار هوانوردی و فضانوردان در MIT می گوید: "این الگوریتم در مؤلفه هایی ایجاد می شود که به یک ربات کمک می کند تا توقف و همپوشانی در حرکت را درک کند و همپوشانی داشته باشد ، که بخش اصلی حرکت انسان است.""این تکنیک یکی از روشهای مختلفی است که ما روی روبات ها کار می کنیم و مردم را بهتر درک می کنیم."
شاه و همکارانش ، از جمله پروژه رهبر و دانشجوی فارغ التحصیل Przemyslaw "PEM" Lasota ، نتایج خود را در این ماه در کنفرانس Robotics: Science and Systems در آلمان ارائه می دهند.
پخش ویدئو
خوشه دار
برای فعال کردن روبات ها برای پیش بینی حرکات انسانی ، محققان به طور معمول الگوریتم هایی را از موسیقی و پردازش گفتار وام می گیرند. این الگوریتم ها به منظور تراز کردن دو سری کامل زمان یا مجموعه ای از داده های مرتبط ، مانند یک آهنگ صوتی از عملکرد موسیقی و یک فیلم پیمایش کننده از نماد موسیقی آن قطعه طراحی شده اند.
محققان از الگوریتم های تراز مشابه برای همگام سازی در زمان واقعی و اندازه گیری های قبلاً ضبط شده از حرکت انسان استفاده کرده اند تا پیش بینی کنند که یک شخص از این پس از این پس کجا خواهد بود. اما برخلاف موسیقی یا گفتار ، حرکت انسان می تواند کثیف و بسیار متغیر باشد. حتی برای حرکات تکراری ، مانند رسیدن به یک میز برای پیچ در پیچ ، ممکن است یک نفر هر بار کمی متفاوت حرکت کند.
الگوریتم های موجود به طور معمول داده های حرکتی جریان را در قالب نقاط نشان می دهند که موقعیت یک شخص را با گذشت زمان نشان می دهد و مسیر آن نقاط را با یک کتابخانه از مسیرهای مشترک برای سناریوی داده شده مقایسه می کند. یک الگوریتم از نظر فاصله نسبی بین نقاط ، یک مسیر را نقشه برداری می کند.
اما لازوتا می گوید الگوریتم هایی که مسیرهای مبتنی بر فاصله را به تنهایی پیش بینی می کنند می توانند در برخی شرایط مشترک مانند توقف های موقت به راحتی اشتباه بگیرند ، که در آن شخص قبل از ادامه مسیر خود مکث می کند. در حالی که مکث می شود ، نقاط نمایانگر موقعیت شخص می توانند در همان نقطه قرار بگیرند.
لاسوتا می گوید: "وقتی به داده ها نگاه می کنید ، وقتی یک شخص متوقف می شود ، یک دسته کامل از نقاط را جمع می کنید.""اگر شما فقط به فاصله بین نقاط به عنوان متریک تراز خود نگاه می کنید ، این می تواند گیج کننده باشد ، زیرا همه آنها به هم نزدیک هستند ، و شما ایده خوبی ندارید که باید با کدام نقطه مطابقت داشته باشید."
همین مسئله با مسیرهای همپوشانی نیز پیش می رود - مواردی که شخص در طی یک مسیر مشابه به جلو و عقب حرکت می کند. لازوتا می گوید که در حالی که موقعیت فعلی شخص ممکن است با یک نقطه در یک مسیر مرجع مطابقت داشته باشد ، الگوریتم های موجود نمی توانند بین اینکه آیا این موقعیت بخشی از یک مسیر دور است ، یا بازگشت در همان مسیر ، تمایز قائل شوند.
لاسوتا می گوید: "شما ممکن است از نظر فاصله نزدیک به هم امتیاز داشته باشید ، اما از نظر زمان ، موقعیت شخص ممکن است در واقع از یک مرجع دور باشد."
این همه در زمان بندی است
به عنوان یک راه حل ، لازوتا و شاه یک الگوریتم "مسیر جزئی" را ابداع کردند که بخش هایی از مسیر یک شخص را در زمان واقعی با یک کتابخانه از مسیرهای مرجع قبلاً جمع آوری می کند. نکته مهم این است که الگوریتم جدید مسیرها را در فاصله و زمان بندی هماهنگ می کند ، و از این طریق ، قادر به پیش بینی دقیق توقف ها و همپوشانی ها در مسیر یک شخص است.
لاسوتا توضیح می دهد: "بگویید شما این حرکات را اجرا کرده اید.""تکنیک های قدیمی می گویند ،" این نزدیکترین نکته در مورد این مسیر نماینده برای آن حرکت است. "زمان بندی ، بعید است که شما در حال بازگشت خود باشید ، زیرا شما فقط حرکت خود را شروع کرده اید. "
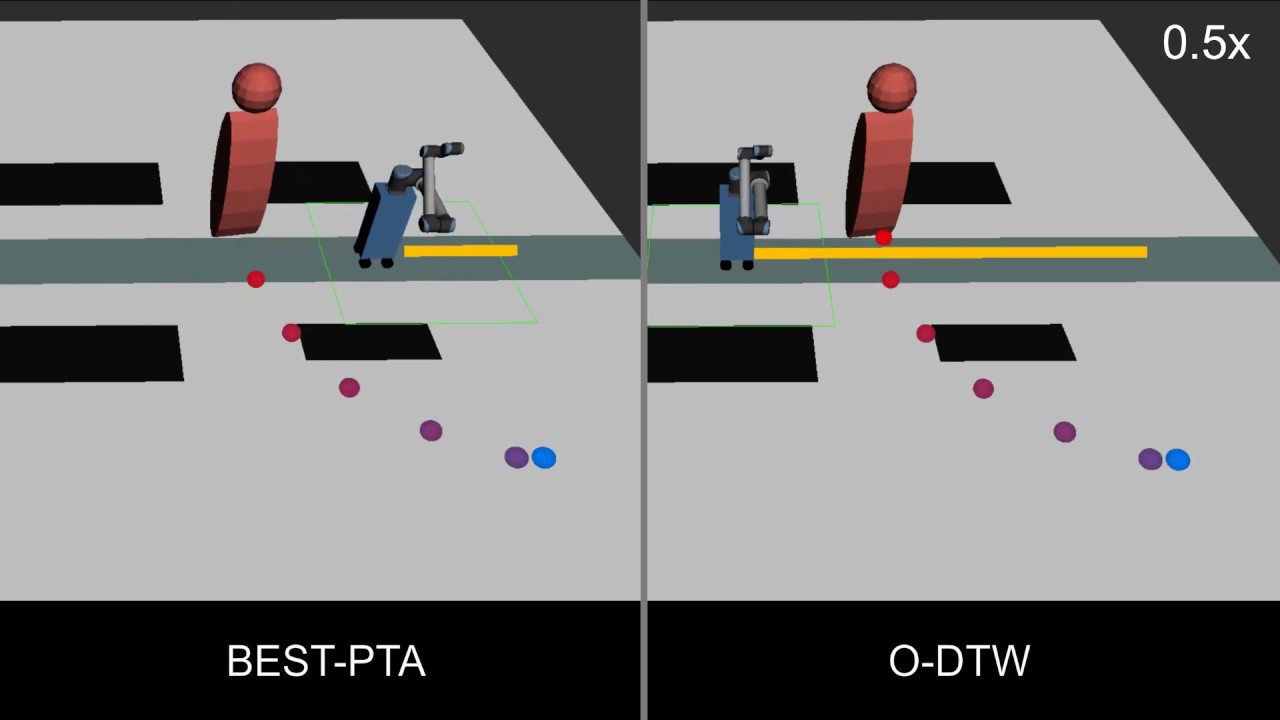
این تیم الگوریتم را بر روی دو مجموعه داده حرکت انسانی آزمایش کرد: یکی که در آن شخص به طور متناوب از مسیر ربات در یک کارخانه عبور کرده است (این داده ها از آزمایش های تیم با BMW به دست آمده است) و دیگری که در آن گروه قبلاً حرکات دستی دست از شرکت کنندگان را ضبط می کردرسیدن به یک میز برای نصب یک پیچ که یک ربات با مسواک زدن درزگیر روی پیچ آن را ایمن می کند.
برای هر دو مجموعه داده ، الگوریتم تیم توانست در مقایسه با دو الگوریتم تراز جزئی که معمولاً استفاده می شود ، تخمین های بهتری از پیشرفت شخص از طریق یک مسیر انجام دهد. علاوه بر این ، تیم دریافت که وقتی آنها الگوریتم تراز را با پیش بینی کننده حرکت خود ادغام می کنند ، این روبات می تواند با دقت بیشتری زمان حرکت یک شخص را پیش بینی کند. به عنوان مثال ، در سناریوی طبقه کارخانه ، آنها دریافتند که این روبات کمتر مستعد انجماد در محل است و در عوض ، اندکی پس از عبور از یک شخص از مسیر خود ، کار خود را از سر گرفت.
در حالی که این الگوریتم در زمینه پیش بینی حرکت مورد بررسی قرار گرفت ، می توان از آن به عنوان یک مرحله پیش پردازش برای سایر تکنیک های موجود در زمینه تعامل انسان-ربات ، مانند تشخیص عمل و تشخیص ژست استفاده کرد. شاه می گوید این الگوریتم ابزاری اساسی برای قادر به تشخیص و پاسخگویی به الگوهای حرکات و رفتارهای انسانی خواهد بود. در نهایت ، این می تواند به انسان ها و روبات ها کمک کند تا در محیط های ساختاری مانند تنظیمات کارخانه و حتی در برخی موارد خانه با یکدیگر همکاری کنند.
شاه می گوید: "این تکنیک می تواند برای هر محیطی اعمال شود که انسان الگوهای رفتار معمولی را نشان دهد."نکته مهم این است که سیستم [رباتیک] می تواند الگویی را که بارها و بارها رخ می دهد رعایت کند ، تا بتواند چیزی در مورد رفتار انسان بیاموزد. این همه در جهت کار ربات جنبه های حرکت انسان را بهتر درک می کند تا بتواند بهتر با ما همکاری کند. "
این تحقیق تا حدودی توسط یک کمک هزینه تحقیقاتی فناوری فضایی ناسا و بنیاد ملی علوم تأمین شد.
پایگاه های معاملاتی...
ما را در سایت پایگاه های معاملاتی دنبال می کنید
برچسب : نویسنده : فرشته صدرعرفایی بازدید : 46
لینک دوستان
خبرنامه
